

Arduino和3D打印技术自制RC无线控制器制作过程详解
发布日期:2022-02-27 05:07 点击次数:219

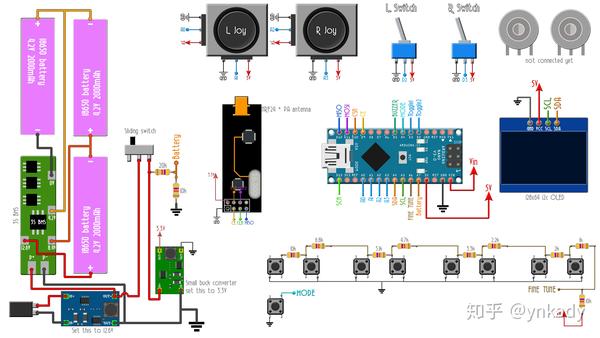
第1部分—发射机原理图
下面是这个项目的示意图,其中包含所有连接和组件值。在下面的完整部件列表中也检查这个项目所需的所有内容。确保你把降压转换器设置为12.6V和3.3V,然后再连接到电路。这是非常重要的。对于发射机,您需要一个NRF24模块与功率放大天线,以获得更广的通讯范围。
第2部分- src="https://pic2.zhimg.com/v2-0c7fa2f15c6095293367b5568267b15d_b.jpg">
我用了2个周长和20%填充所有的零件和PLA材料。不需要支持。零件已经定向好,可以打印了。我的打印机有一个0.4mm的喷嘴老虎机规则,图层高度设置为0.3mm。
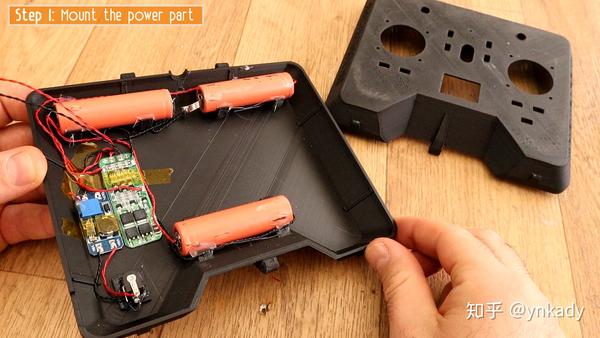
第3部分- 接收器组装
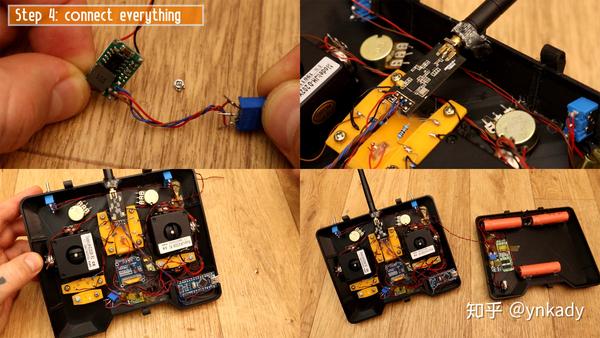
首先,我把电池串联起来,把它们粘在无线电控制器的后面。然后焊接电线从直流插座到大电流升压/降压转换器,插入主适配器。然后我将转换器设置为12.6V,并粘上电位器,这样它就会保持这种状态。现在我将电池连接到3S 平衡充电板,并将buck对流器的输出连接到BMS输入/输出。我把所有东西都粘在箱子上。
第二步是添加所有的小按钮。在每个支撑孔上放置两个按钮,如下所示。同样,一个按钮上在小的支撑孔上。然后,在盖子顶部的每个孔上添加一个小的塑料按钮,然后我们在3D打印外壳的每个顶部支撑柱的位置拧上螺钉固定。

现在,用导线连接操纵杆电位器到GND,5V和信号。然后将操纵杆和滑动开关螺丝固定在控制器中间。在顶部添加触发开关和电位器。最后,将Arduino NANO开发板粘在一个角落上。

好的,现在,非常重要的一步你要把小的buck转换器设置为3.3V,然后把电位计粘在一起。然后将其连接到NRF24模块。最后,将所有的电线连接到Arduino,如图所示。加上i2c OLED显示屏,把所有东西都粘在盒子里。从箱子的另一部分接上电源,就这样。现在您可以盖好外壳并为Arduino Nano控制板编写程序。
好的,对于代码,请确保从下面的链接下载并安装OLED和NRF24库。然后,下载代码,编译并将其上传到Arduino。要了解更多细节,请阅读代码中的注释,以便了解如何调节和优化操纵杆信号读取和电池读取的所有值。
#include <SPI.h> #include <nRF24L01.h> //Downlaod it here: https://www.electronoobs.com/eng_arduino_NRF24.php #include <RF24.h> #include <Wire.h> #include <Adafruit_GFX.h> //Downlaod it here: https://www.electronoobs.com/eng_arduino_Adafruit_GFX.php #include <Adafruit_SSD1306.h> //Downlaod it here: https://www.electronoobs.com/eng_arduino_Adafruit_SSD1306.php #include <EEPROM.h> /*A basic 6 channel transmitter using the nRF24L01 module.*/ /* Like, share and subscribe, ELECTRONOOBS */ /* http://www.youtube/c/electronoobs */ /* First we include the libraries. Download it from my webpage if you donw have the NRF24 library */ //This are the bytes for the EN logo static const unsigned char PROGMEM my_logo[] = {/* 0X00,0X01,0X7C,0X00,0X40,0X00, */ 0X00,0X00,0X00,0X00,0X00,0X01,0XFF,0XC0,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0XFF,0XE0,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XF0,0X00,0X18,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XF8,0X00,0X7C,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X3C,0XFC,0X03,0XFC,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X7C,0XF8,0X1F,0XFC,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0XFC,0XF0,0XFE,0X78,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X7D,0XE0,0XFC,0X30,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XC0,0XFC,0X30,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0XFF,0XE0,0XF8,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0XFF,0XF8,0XF8,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0XF8,0XF9,0XF8,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0XF8,0XF9,0XF8,0X00,0X06,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X01,0XF0,0XF9,0XFE,0X00,0X3C,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X01,0XF9,0XF8,0XFF,0XFF,0XF8,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X01,0XF8,0X80,0XFF,0XFF,0XE0,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XFF,0X80,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XFC,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X20,0X20,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X18,0X00,0X0C,0X00,0X00,0X04,0X00,0X08,0X00,0X00,0X40,0X30,0X00,0X00,0X00, 0X01,0XF8,0X00,0XFC,0X00,0X0F,0XFF,0X80,0XFF,0X80,0X07,0XC1,0XF0,0X07,0X00,0X00, 0X07,0XF8,0X73,0XFC,0X03,0X1F,0XFF,0XC3,0XF3,0XC0,0X0F,0XC7,0XE0,0X7F,0X04,0XE0, 0X07,0X18,0XE3,0X8C,0X0F,0XBE,0X3D,0XC3,0XF9,0XE7,0X9F,0XC7,0XF1,0XFF,0X1F,0XE0, 0X0E,0X01,0XE7,0X00,0X7F,0X2E,0X39,0XC7,0XF1,0XF7,0X1F,0XCF,0XE1,0XE7,0XBF,0X00, 0X1F,0XC3,0XEF,0XE1,0XE3,0X0C,0X3B,0X86,0X73,0XFF,0X3B,0X8C,0XE1,0XC7,0XFF,0X00, 0X1F,0X83,0XCF,0XC1,0XE2,0X1C,0X3F,0X0E,0XF3,0XBF,0X33,0X9D,0XE3,0XFC,0X1F,0XC0, 0X1C,0X07,0XCE,0X01,0XE0,0X1C,0X3F,0XCE,0XE7,0XBF,0X77,0X9D,0XC3,0XFE,0X03,0XE0, 0X3C,0XE7,0X9E,0X71,0XC0,0X1C,0X79,0XCF,0XE7,0X1F,0X7F,0X1F,0XC7,0XCE,0X03,0XC0, 0X3F,0XE7,0X9F,0XF1,0XE0,0X3C,0X73,0XCF,0XE7,0X1F,0X7F,0X1F,0XC7,0XDE,0X7F,0XC0, 0XFF,0X0F,0X3F,0X81,0XFF,0XF8,0X7B,0XC7,0X8E,0X0E,0X3E,0X0F,0X0F,0XFF,0XFF,0X00, 0X00,0X0F,0X04,0X00,0XFF,0XE0,0X40,0X01,0X18,0X06,0X0C,0X02,0X0F,0XFF,0XFC,0X00, 0X00,0X0F,0X1C,0X00,0XFF,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X08,0X60,0X00, 0X00,0X1F,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X3F,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X80,0X00,0X00,0X00,0X00,0X00, 0X00,0X70,0X00,0X00,0X00,0X07,0XFC,0X00,0X00,0X01,0XC0,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X0F,0XAF,0X00,0X00,0X03,0XE0,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X38,0X03,0X80,0X00,0X03,0X60,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X78,0X41,0XC0,0X00,0X03,0XE0,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X63,0XFC,0X60,0X00,0X07,0X60,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0XC7,0XFE,0X70,0X00,0X3F,0XFE,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X01,0XCF,0XFF,0X30,0X00,0X7F,0X7F,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X01,0X9E,0XC7,0X10,0X00,0X6B,0XAB,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X01,0X9B,0X7B,0XB8,0X00,0X7E,0XFF,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X01,0XBD,0XBF,0X98,0X00,0X7F,0X7F,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X03,0X3F,0XAD,0X98,0X00,0X1F,0XFC,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X03,0X37,0XEF,0X98,0X00,0X03,0X60,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X03,0X3D,0XBB,0XD8,0X00,0X03,0XE0,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X03,0X3A,0XED,0X88,0X00,0X03,0X60,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X01,0X9F,0X6F,0X98,0X00,0X03,0XE0,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X01,0X9D,0XFB,0X98,0X79,0XE1,0XC0,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X01,0X9E,0XCF,0X30,0X79,0XC0,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0XCF,0X7E,0X30,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0XC7,0XFE,0X60,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X61,0XF0,0XE0,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X38,0X03,0XC0,0X7F,0XE7,0XFC,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X1E,0X07,0X80,0X7F,0XE7,0XFC,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X0F,0XFE,0X00,0X60,0X66,0X0C,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X03,0XF8,0X00,0X60,0X64,0X0C,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XE7,0XF4,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XE7,0XFC,0X00,0X00,0X00,0X00,0X00, 0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00, }; #include <SPI.h> #include <nRF24L01.h> //Downlaod it here: https://www.electronoobs.com/eng_arduino_NRF24.php #include <RF24.h> #include <Wire.h> #include <Adafruit_GFX.h> //Downlaod it here: https://www.electronoobs.com/eng_arduino_Adafruit_GFX.php #include <Adafruit_SSD1306.h> //Downlaod it here: https://www.electronoobs.com/eng_arduino_Adafruit_SSD1306.php #include <EEPROM.h> /////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //OLED setup #define OLED_RESET 8 Adafruit_SSD1306 display(OLED_RESET); #define NUMFLAKES 5 #define XPOS 0 #define YPOS 1 #define DELTAY 2 #if (SSD1306_LCDHEIGHT != 64) #error("Height incorrect, please fix this in the Adafruit_SSD1306.h!"); #endif /////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// /*Create a unique pipe out. The receiver has to wear the same unique code*/ const uint64_t pipeOut = 0xE8E8F0F0E1LL; //IMPORTANT: The same as in the receiver!!! RF24 radio(9, 10); // select CSN pin // The sizeof this struct should not exceed 32 bytes // This gives us up to 32 8 bits channals struct MyData { byte throttle; byte yaw; byte pitch; byte roll; byte AUX1; byte AUX2; }; MyData data; //Inputs outputs int battery_in = A7; //pin for analog in from the battery divider int buttons_analog_in = A6; //Analog in from all the push buttons int toggle_1 = 3; int toggle_2 = 2; int throttle_in = A0; int yaw_in = A1; int pitch_in = A2; int roll_in = A3; int mode_in = 4; int buzzer = 5; //Variables float battery_level = 0; int throttle_fine = 0; int yaw_fine = 0; int pitch_fine = 0; int roll_fine = 0; int button_read = 0; int throttle_to_send = 0; int yaw_to_send = 0; int pitch_to_send = 0; int roll_to_send = 0; bool throttle_inverted = false; bool yaw_inverted = true; bool pitch_inverted = true; bool roll_inverted = false; bool yaw_decrease = false; bool throttle_decrease = false; bool pitch_decrease = false; bool roll_decrease = false; bool yaw_increase = false; bool throttle_increase = false; bool pitch_increase = false; bool roll_increase = false; bool mode = true; bool mode_button_pressed = false; bool sound = true; int counter = 0; int invert_counter = 0; bool sound_changed = false; void resetData() { //This are the start values of each channal // Throttle is 0 in order to stop the motors //127 is the middle value of the 10ADC. data.throttle = 127; data.yaw = 127; data.pitch = 127; data.roll = 127; data.AUX1 = 0; data.AUX2 = 0; } void setup() { if( EEPROM.read(1) != 55) { EEPROM.write(2, 127); EEPROM.write(3, 127); EEPROM.write(4, 127); EEPROM.write(5, 127); EEPROM.write(6, 0); EEPROM.write(7, 1); EEPROM.write(8, 1); EEPROM.write(9, 0); EEPROM.write(1, 55); } throttle_fine = EEPROM.read(2); yaw_fine = EEPROM.read(3); pitch_fine = EEPROM.read(4); roll_fine = EEPROM.read(5); throttle_inverted = EEPROM.read(6); yaw_inverted = EEPROM.read(7); pitch_inverted = EEPROM.read(8); roll_inverted = EEPROM.read(9); pinMode(buttons_analog_in, INPUT); pinMode(mode_in, INPUT_PULLUP); pinMode(buzzer, OUTPUT); digitalWrite(buzzer,LOW); display.begin(SSD1306_SWITCHCAPVCC, 0x3C); // initialize with the I2C addr 0x3C (for the 128x32) delay(100); display.clearDisplay(); display.setTextSize(1); //Set text size display.setTextColor(WHITE); //Choose color display.drawBitmap(0, 0, my_logo, 128, 64, 1); digitalWrite(buzzer,HIGH); delay(40); digitalWrite(buzzer,LOW); delay(40); digitalWrite(buzzer,HIGH); delay(40); digitalWrite(buzzer,LOW); display.display(); delay(2000); //Start everything up radio.begin(); radio.setAutoAck(false); radio.setPALevel(RF24_PA_HIGH); radio.setDataRate(RF24_250KBPS); radio.openWritingPipe(pipeOut); resetData(); } /**************************************************/ int map_normal(int val, int lower, int middle, int upper, bool reverse) { val = constrain(val, lower, upper); if ( val < middle ) val = map(val, lower, middle, 0, 128); else val = map(val, middle, upper, 128, 255); return ( reverse ? 255 - val : val ); } // Returns a corrected value for a joystick position that takes into account // the values of the outer extents and the middle of the joystick range. int map_exponential(int val, bool reverse) { val = constrain(val, 0, 1023); float cube = ((pow((val - 512),3)/520200) + 258.012) / 2; return ( reverse ? 255 - cube : cube ); } void loop() { //battery read battery_level = analogRead(battery_in) / 67.331; //////Voltage divider is 10k and 20K so 1/3 //Buttons read button_read = analogRead(buttons_analog_in); //Reset buttons if(button_read > 820) { yaw_decrease = false; throttle_decrease = false; pitch_decrease = false; roll_decrease = false; yaw_increase = false; throttle_increase = false; pitch_increase = false; roll_increase = false; } ////////////////////////////////////////////////////////////////////////////////////////// //YAW buttons if(button_read < 260 && button_read > 200 && !yaw_decrease) { yaw_fine = yaw_fine + 1; yaw_decrease = true; EEPROM.write(3, yaw_fine); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } } if(button_read < 120 && button_read > 50 && !yaw_increase) { yaw_fine = yaw_fine - 1; yaw_increase = true; EEPROM.write(3, yaw_fine); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } } ////////////////////////////////////////////////////////////////////////////////////////// //THROTTLE buttons if(button_read < 500 && button_read > 430 && !throttle_decrease) { throttle_fine = throttle_fine + 1; throttle_decrease = true; EEPROM.write(2, throttle_fine); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } } if(button_read < 380 && button_read > 320 && !throttle_increase) { throttle_fine = throttle_fine - 1; throttle_increase = true; EEPROM.write(2, throttle_fine); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } } ////////////////////////////////////////////////////////////////////////////////////////// //PITCH buttons if(button_read < 610 && button_read > 550 && !pitch_decrease) { pitch_fine = pitch_fine + 1; pitch_decrease = true; EEPROM.write(4, pitch_fine); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } } if(button_read < 690 && button_read > 630 && !pitch_increase) { pitch_fine = pitch_fine - 1; pitch_increase = true; EEPROM.write(4, pitch_fine); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } } ////////////////////////////////////////////////////////////////////////////////////////// //ROLL buttons if(button_read < 820 && button_read > 760 && !roll_decrease) { roll_fine = roll_fine + 1; roll_decrease = true; EEPROM.write(5, roll_fine); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } } if(button_read < 760 && button_read > 700 && !roll_increase) { roll_fine = roll_fine - 1; roll_increase = true; EEPROM.write(5, roll_fine); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } } //Mode select button if(!digitalRead(mode_in) && !mode_button_pressed) { mode = !mode; mode_button_pressed = true; if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } } if(!digitalRead(mode_in) && !sound_changed) { if(counter > 20) { sound = !sound; counter = 0; sound_changed = true; if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } } counter = counter + 1; } //Invert channels //THROTTLE INVERT if(button_read < 500 && button_read > 430) { if(invert_counter > 30) { throttle_inverted = !throttle_inverted; invert_counter = 0; EEPROM.write(6, throttle_inverted); display.clearDisplay(); //Clear the display display.setCursor(13,30); //Select where to print 124 x 64 display.print("Throttle inverted"); display.display(); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } delay(1500); } invert_counter = invert_counter + 1; } //YAW INVERT if(button_read < 260 && button_read > 200) { if(invert_counter > 30) { yaw_inverted = !yaw_inverted; invert_counter = 0; EEPROM.write(7, yaw_inverted); display.clearDisplay(); //Clear the display display.setCursor(15,30); //Select where to print 124 x 64 display.print(" Yaw inverted"); display.display(); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } delay(1500); } invert_counter = invert_counter + 1; } //PITCH INVERT if(button_read < 610 && button_read > 550) { if(invert_counter > 30) { pitch_inverted = !pitch_inverted; invert_counter = 0; EEPROM.write(8, pitch_inverted); display.clearDisplay(); //Clear the display display.setCursor(13,30); //Select where to print 124 x 64 display.print(" Pitch inverted"); display.display(); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } delay(1500); } invert_counter = invert_counter + 1; } //ROLL INVERT if(button_read < 820 && button_read > 760) { if(invert_counter > 30) { roll_inverted = !roll_inverted; invert_counter = 0; EEPROM.write(9, roll_inverted); display.clearDisplay(); //Clear the display display.setCursor(15,30); //Select where to print 124 x 64 display.print(" Roll inverted"); display.display(); if(sound) { digitalWrite(buzzer,HIGH); delay(50); digitalWrite(buzzer,LOW); } delay(1500); } invert_counter = invert_counter + 1; } if(digitalRead(mode_in) && mode_button_pressed) { mode_button_pressed= false; sound_changed = false; counter = 0; invert_counter = 0; } //Mode select if(!mode) { throttle_to_send = map_normal(analogRead(throttle_in), 0, 512, 1023, throttle_inverted); yaw_to_send = map_normal(analogRead(yaw_in), 0, 512, 1023, yaw_inverted); pitch_to_send = map_normal(analogRead(pitch_in), 0, 512, 1023, pitch_inverted); roll_to_send = map_normal(analogRead(roll_in), 0, 512, 1023, roll_inverted); } if(mode) { throttle_to_send = map_exponential(analogRead(throttle_in), throttle_inverted); yaw_to_send = map_exponential(analogRead(yaw_in), yaw_inverted); pitch_to_send = map_exponential(analogRead(pitch_in), pitch_inverted); roll_to_send = map_exponential(analogRead(roll_in), roll_inverted); } throttle_to_send = throttle_to_send + throttle_fine - 127; yaw_to_send = yaw_to_send + yaw_fine - 127; pitch_to_send = pitch_to_send + pitch_fine - 127; roll_to_send = roll_to_send + roll_fine - 127; data.throttle = constrain(throttle_to_send,0,255); data.yaw = constrain(yaw_to_send,0,255); data.pitch = constrain(pitch_to_send,0,255); data.roll = constrain(roll_to_send,0,255); data.AUX1 = digitalRead(toggle_1); data.AUX2 = digitalRead(toggle_2); radio.write(&data, sizeof(MyData)); display.clearDisplay(); //Clear the display if(sound) { display.setCursor(0,0); //Select where to print 124 x 64 display.print("Sound ON"); } if(!sound) { display.setCursor(0,0); //Select where to print 124 x 64 display.print("Sound OFF"); } display.setCursor(90,0); //Select where to print 124 x 64 display.print(battery_level,1); display.print("V"); display.setCursor(0,16); //Select where to print 124 x 64 display.print("T: "); display.print(throttle_to_send); display.print(" P: "); display.print(pitch_to_send); display.setCursor(0,29); display.print("Y: "); display.print(yaw_to_send); display.print(" R: "); display.print(roll_to_send); // display.setCursor(0,42); display.print("SW1: "); display.print(digitalRead(toggle_1)); display.print(" SW2: "); display.print(digitalRead(toggle_2)); if(mode) { display.setCursor(0,56); display.print("Mode: "); display.print("Exponential"); } if(!mode) { display.setCursor(0,56); display.print("Mode: "); display.print("Linear"); } // display.display(); }将上面的代码拷贝到Arduino IDE中,编绎正确后,用USB电缆连接计算机和控制器上的USB接口,将编译通过的固件上传到控制器中,至此,大功告成。
